ToF Cameras vs LiDAR: Archaeology, Surveying, and Point Cloud Processing
(2026年01月30日)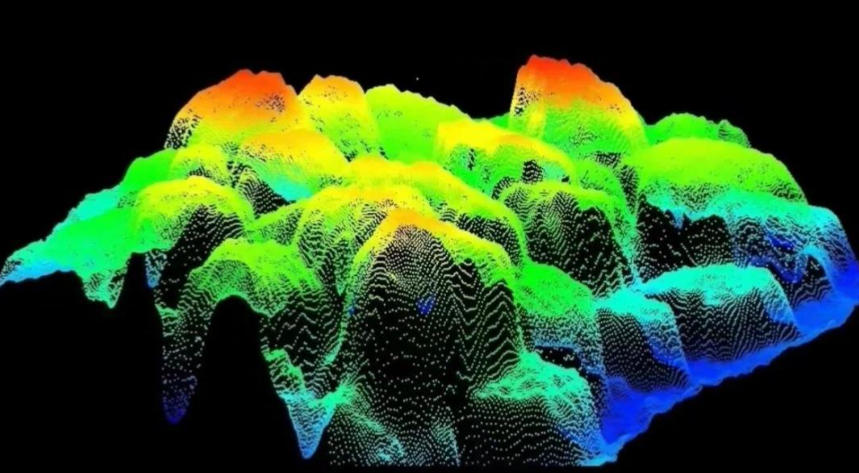
How ToF Cameras and LiDAR Are Transforming Archaeology, Surveying, and Point Cloud Processing
With the rapid evolution of 3D perception technology, spatial data acquisition, and distance sensing systems, Time-of-Flight (ToF) cameras, LiDAR sensors, and advanced point cloud processing technologies have become foundational tools in archaeology, land surveying, GIS, and digital heritage preservation.
From LiDAR scanning of ancient pyramids to 3D digital twins of modern cities, and from historical route reconstruction to high-precision geospatial mapping, these technologies are redefining how humans perceive space, analyze terrain, and digitally preserve history.
1. What Is Time-of-Flight (ToF) Distance Measurement?
Time-of-Flight (ToF) is a distance measurement principle that calculates the distance between a sensor and an object by measuring the time it takes for a light signal to travel to the object and return. The fundamental formula is:
Distance = (Speed of Light × Time of Flight) ÷ 2
Based on this principle, a ToF camera captures distance information for every pixel in a single exposure, generating a real-time depth map. As a representative active distance sensing sensor, ToF technology enables fast, contactless, and highly integrated 3D perception.
ToF distance measurement is widely used in robot vision, industrial automation, 3D scanning, AR/VR spatial sensing, and embedded depth perception systems.
2. Types of Distance Sensors and the Role of ToF Technology
In fields such as industrial automation, robot navigation, UAV surveying, 3D mapping, and smart manufacturing, distance sensors form the backbone of spatial awareness and precise positioning.
Common Distance Sensor Technologies
● ToF Optical Distance Sensors (ToF Cameras / Time-of-Flight Sensors)
ToF sensors directly measure distance using the flight time of infrared or laser pulses, producing pixel-level depth images. They are optimized for short-to-medium range distance measurement, offering:
High frame rates and low latency
Real-time depth output
Compact form factor and low power consumption
Typical applications include indoor robot navigation, gesture recognition, RGB-D perception, AR/VR, and industrial inspection.
● LiDAR (Light Detection and Ranging)
LiDAR systems emit high-speed laser pulses and measure their reflections to create high-precision 3D point clouds. LiDAR excels in:
Long-range distance measurement
Large-scale terrain mapping
High-accuracy geospatial data acquisition
LiDAR is indispensable in autonomous driving, UAV photogrammetry, smart city digital twins, topographic surveying, and geospatial analysis.
● Ultrasonic Sensors
Ultrasonic sensors measure distance using sound waves and are commonly used for short-range obstacle detection, liquid level measurement, and simple automation tasks. While cost-effective and robust, their limited accuracy and range restrict them from complex 3D modeling.
● Millimeter-Wave (mmWave) Radar
mmWave radar uses electromagnetic waves to measure distance and velocity. Its all-weather performance makes it ideal for automotive safety, robot navigation, and industrial monitoring, especially in fog, dust, or rain.
● Structured Light Depth Cameras
Structured light systems project known patterns onto objects and analyze deformation to compute depth. They are effective for high-resolution short-range 3D scanning, facial recognition, and gesture tracking, but are sensitive to ambient light and limited in outdoor applications.
ToF vs. LiDAR: Positioning and Key Differences
Although both ToF and LiDAR are active ranging technologies, their performance characteristics and application scenarios differ significantly.

FeatureToF CameraLiDAR
Measurement RangeShort–medium (cm to several meters)Long (tens to hundreds of meters)
Data OutputPixel-level depth mapsHigh-precision 3D point clouds
Accuracymm–cm levelcm–mm level
Frame RateHigh, low latencyLower, scan-dependent
CostLow to mediumHigh
Typical UseIndoor robots, AR/VR, digital twinsAutonomous driving, UAV surveying, smart cities
ToF cameras are ideal for real-time, cost-sensitive, short-range perception, while LiDAR systems dominate large-scale, high-precision 3D mapping.
In practice, modern systems often integrate ToF + LiDAR + IMU + GNSS, achieving seamless 3D perception from indoor environments to outdoor terrains.
3. Breakthrough Applications of LiDAR in Archaeology
LiDAR for archaeology has become a high-impact research direction in recent years. Airborne and UAV-mounted LiDAR systems allow archaeologists to detect hidden structures without excavation, even beneath dense vegetation or sand layers.
Pyramid LiDAR Scanning
In regions such as Egypt, Mesoamerica, and Central America, pyramid LiDAR surveys are used to:
Reveal internal pyramid structures
Detect hidden chambers and passageways
Create ultra-high-resolution 3D digital models
These datasets are converted into point cloud data, enabling detailed analysis using archaeological and geospatial software.
4. Point Cloud Data and Processing Technologies
Point cloud data is the core output of ToF cameras and LiDAR systems. Each point typically contains X, Y, Z coordinates, and may also include intensity, reflectivity, or RGB color data.
Point clouds serve as the fundamental data structure for 3D perception, surveying, digital reconstruction, and spatial analysis.
Standard Point Cloud Processing Pipeline
Data Acquisition
Collect raw depth data or LiDAR scans.
Denoising and Filtering
Remove outliers, reduce noise, and optimize point density.
Registration and Alignment
Merge multiple scans using algorithms such as ICP (Iterative Closest Point) or feature-based matching.
3D Reconstruction and Measurement
Generate meshes, voxel models, and surfaces for measurement and analysis.

Visualization and Analysis
Segment, colorize, and analyze point clouds using specialized software or code.
Developers commonly use Python, C++, and Point Cloud Library (PCL) to implement advanced point cloud processing workflows.
5. Digitalization of Historical Surveying and Geodetic References
Washington DC Meridian
Before GPS and satellite-based surveying, geodetic reference lines like the Washington DC Meridian played a crucial role in early cartography and coordinate systems. Digitizing these references with LiDAR helps researchers reinterpret historical maps accurately.
Reconstructing Historical Routes: El Camino Real
Using LiDAR and ToF data, historical routes such as El Camino Real in California can be digitally reconstructed, preserving cultural heritage and enabling spatial analysis within modern GIS systems.
This fusion of modern distance sensing and historical research represents a key direction in digital humanities and digital archaeology.
6. Cross-Industry Applications of ToF Technology
Beyond archaeology and surveying, Time-of-Flight technology plays a vital role across modern industries.
Industrial Inspection and Automation
Smart Manufacturing and Mining
Robotics Navigation and Obstacle Avoidance
3D Scanning and Digital Asset Creation
ToF cameras provide real-time depth perception, high stability, and cost-effective deployment, making them ideal for industrial robots, smart factories, and digital twin platforms.
7. Why ToF Is a Critical Complement to the LiDAR Ecosystem
While LiDAR remains the gold standard for long-range high-precision 3D mapping, ToF cameras address key limitations in cost, latency, and close-range interaction.
Together, ToF + LiDAR + Point Cloud Processing form a complete 3D perception ecosystem:
LiDAR: Long-range, large-scale mapping
ToF: Real-time, short-range, low-cost sensing
Point Clouds: Data fusion, analysis, and visualization
This combination is now the mainstream solution in autonomous driving, SLAM, digital twins, industrial robotics, and AR/VR spatial perception.

Conclusion
From Time-of-Flight cameras to LiDAR archaeology, from point cloud processing to digital reconstruction of historical sites, ToF technology continues to evolve alongside LiDAR, driving the next generation of distance sensors and 3D perception systems.
Whether uncovering hidden pyramid chambers or digitally preserving historical routes and geodetic references, ToF and LiDAR together form an indispensable foundation for modern spatial understanding and digital transformation
Synexens Industrial Outdoor 4m TOF Sensor Depth 3D Camera Rangefinder_CS40p

After-sales Support:
Our professional technical team specializing in 3D camera ranging is ready to assist you at any time. Whether you encounter any issues with your TOF camera after purchase or need clarification on TOF technology, feel free to contact us anytime. We are committed to providing high-quality technical after-sales service and user experience, ensuring your peace of mind in both shopping and using our products.
- このできごとのURL:



コメント